NovaticLab
Full-stack clinical lab automation — custom AMRs navigating elevators and doors, robotic sample handling stations, self-sampling kiosks across 21 locations. Deployed at E. Gulbja Laboratory saving 2M+ EUR annually.

Context
NovaticLab builds automation and robotics systems for clinical laboratories and hospitals. The product line covers the entire diagnostic sample lifecycle — from patient self-collection through transport, labeling, sorting, archiving, and retrieval.
This is not a demo. It is a deployed fleet of autonomous robots and robotic workstations operating inside E. Gulbja Laboratory — the largest private diagnostic laboratory in the Baltics, processing 2.1 million examinations and 10.9 million analyses per year.
We led product development and engineering A-to-Z. Custom AMRs. Custom robotic stations. Custom self-sampling kiosks. Full system integration. Everything from first concept to operational deployment.
 NOVAMove Porter in active service — autonomous sample transport through clinical corridors.
NOVAMove Porter in active service — autonomous sample transport through clinical corridors.The problem
Clinical laboratories handle thousands of biological samples daily. Each sample follows a chain: collection → registration → transport → pre-analytical processing → analysis → archiving → retrieval. Every step involves human hands, human errors, and human time.
In a multi-story facility, transport alone eats hours of technician time — walking samples between floors, waiting for elevators, hand-delivering to analyzers. Pre-analytical processing (labeling, sorting, aliquoting) is repetitive, error-prone, and the bottleneck that determines throughput.
The industry’s answer has been belt conveyors and track-based systems. These work for new-build facilities designed around them. They do not work for existing buildings with fixed floor plans, shared corridors, and elevators that were designed for people, not robots.
NovaticLab’s thesis: build autonomous systems that operate in existing clinical infrastructure — no building modifications, no conveyor installation, no dedicated robot corridors.
What was built
Four product families. Each addresses a different segment of the sample lifecycle. All designed to work together as an integrated system, or independently in facilities that need one piece at a time.
NOVAMove Porter — Autonomous Transport

NOVAMove Porter
Autonomous mobile robot for clinical sample transport
- Multi-floor navigation — elevators, doors, corridors
- RFID/NFC/fingerprint/PIN access control
- 30 kg payload capacity
- OPC-UA and MQTT integration
- Fleet management for multi-robot coordination
- 24/7 autonomous operation
This is not a warehouse AGV following floor tape. The NOVAMove Porter navigates real hospital environments — calling elevators, opening doors, yielding to foot traffic, coordinating with other robots in the fleet. It integrates with building management systems to operate infrastructure that was never designed for robotic access.
The access control system is clinical-grade. RFID, NFC, fingerprint, and PIN authentication ensure only authorized personnel can access transported samples. Chain of custody is maintained end-to-end.
Those are real operational numbers from the E. Gulbja deployment. The NOVAMove fleet now handles over 50% of all daily sample transport.
NOVAMove Flex — Robotic Sample Handling
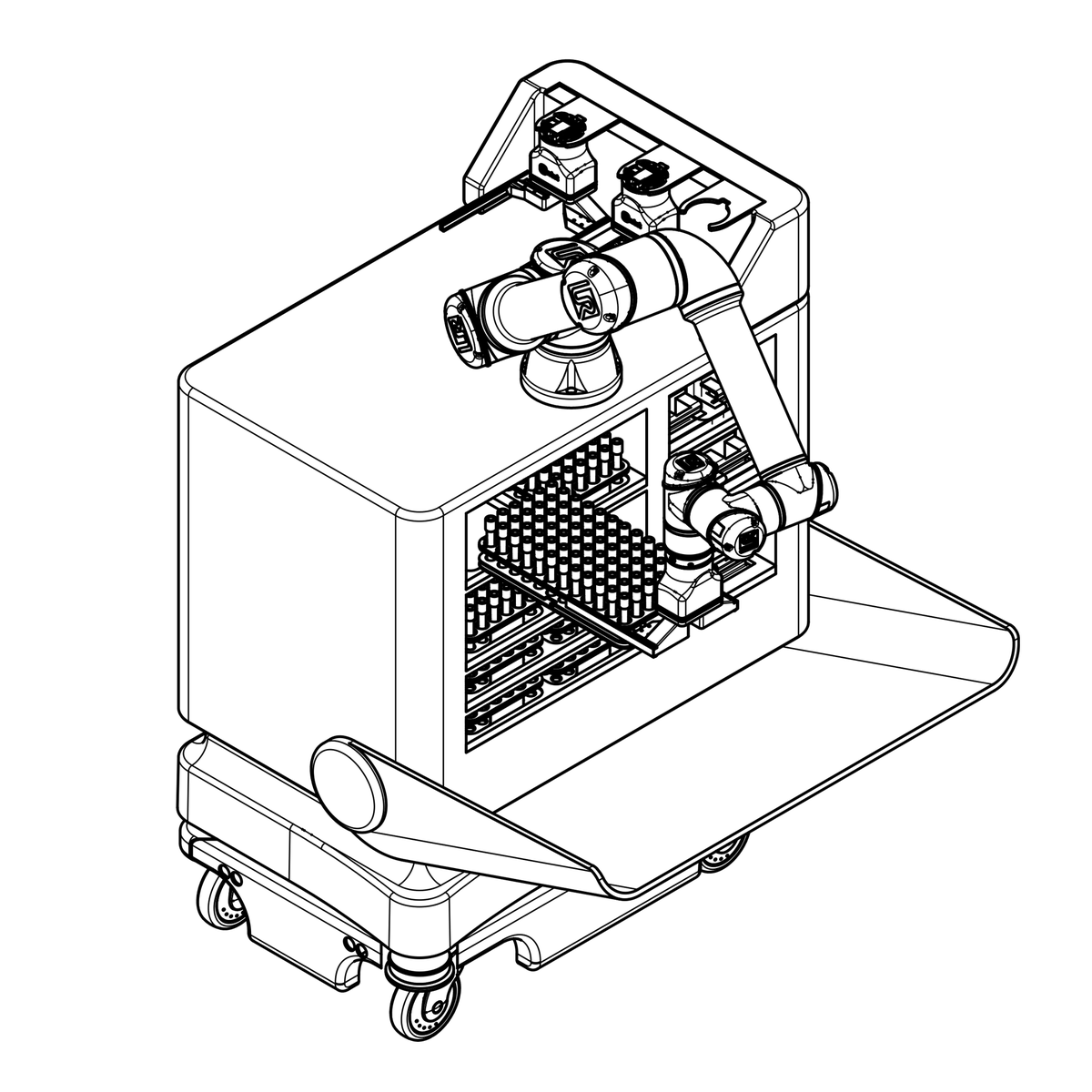
NOVAMove Flex
AMR with integrated robotic arm for automated sample workflows
- Robotic arm with AI vision system
- Automated tool changer for multi-task flexibility
- Seamless AMR + arm coordination
- Plug-and-play integration with NOVAFlex stations
- OPC-UA / MQTT connectivity
The NOVAMove Flex combines autonomous navigation with a robotic arm and AI vision. It doesn’t just transport — it picks, places, and processes. The automated tool changer means a single robot can handle different sample types and container formats without human intervention.
This is where the full-stack integration matters most. The AMR navigation, arm control, vision system, tool changer, and sample tracking all had to be designed as one system. Bolting a robot arm onto a mobile platform does not make a useful clinical system — the coordination, safety, and workflow logic are where the engineering lives.
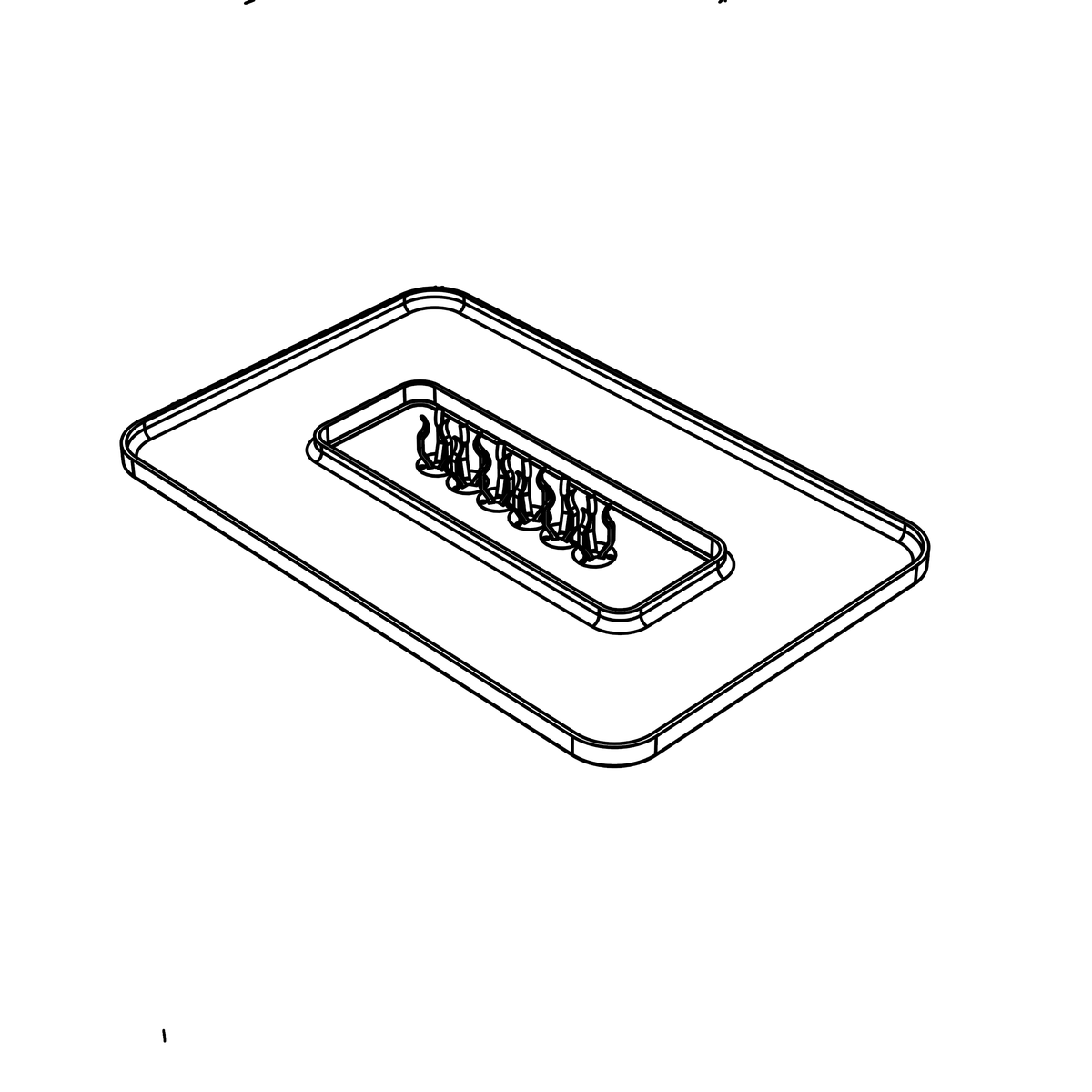
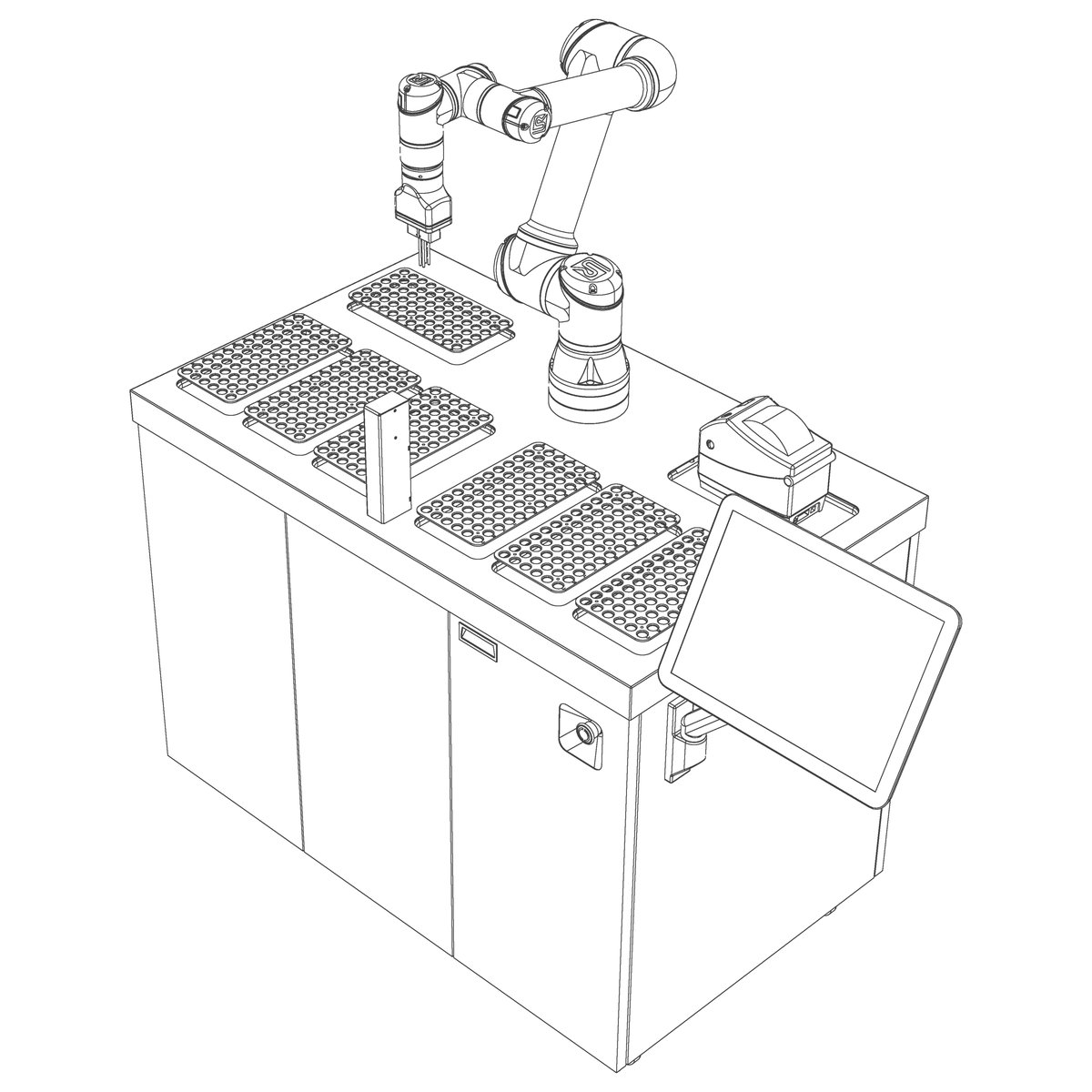
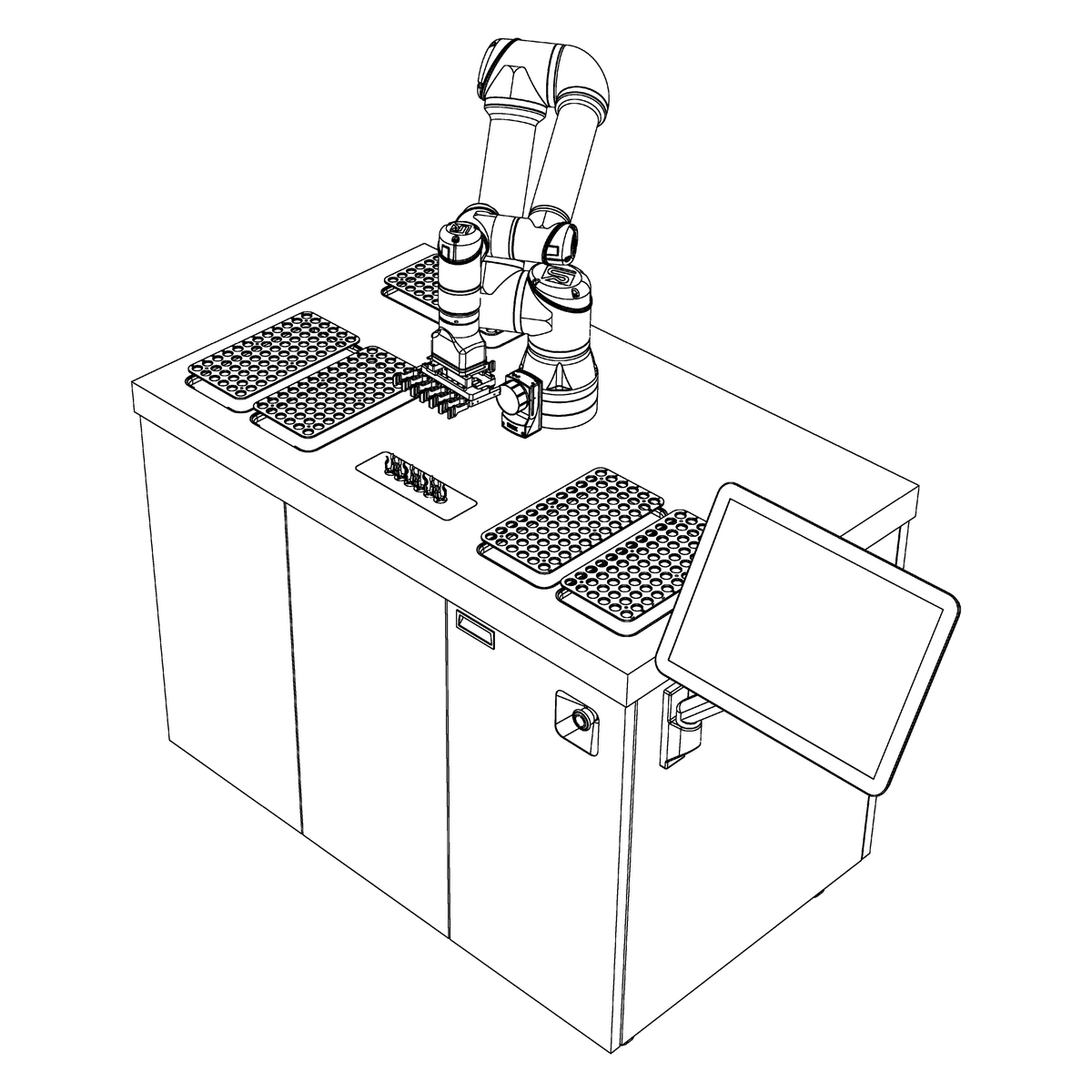
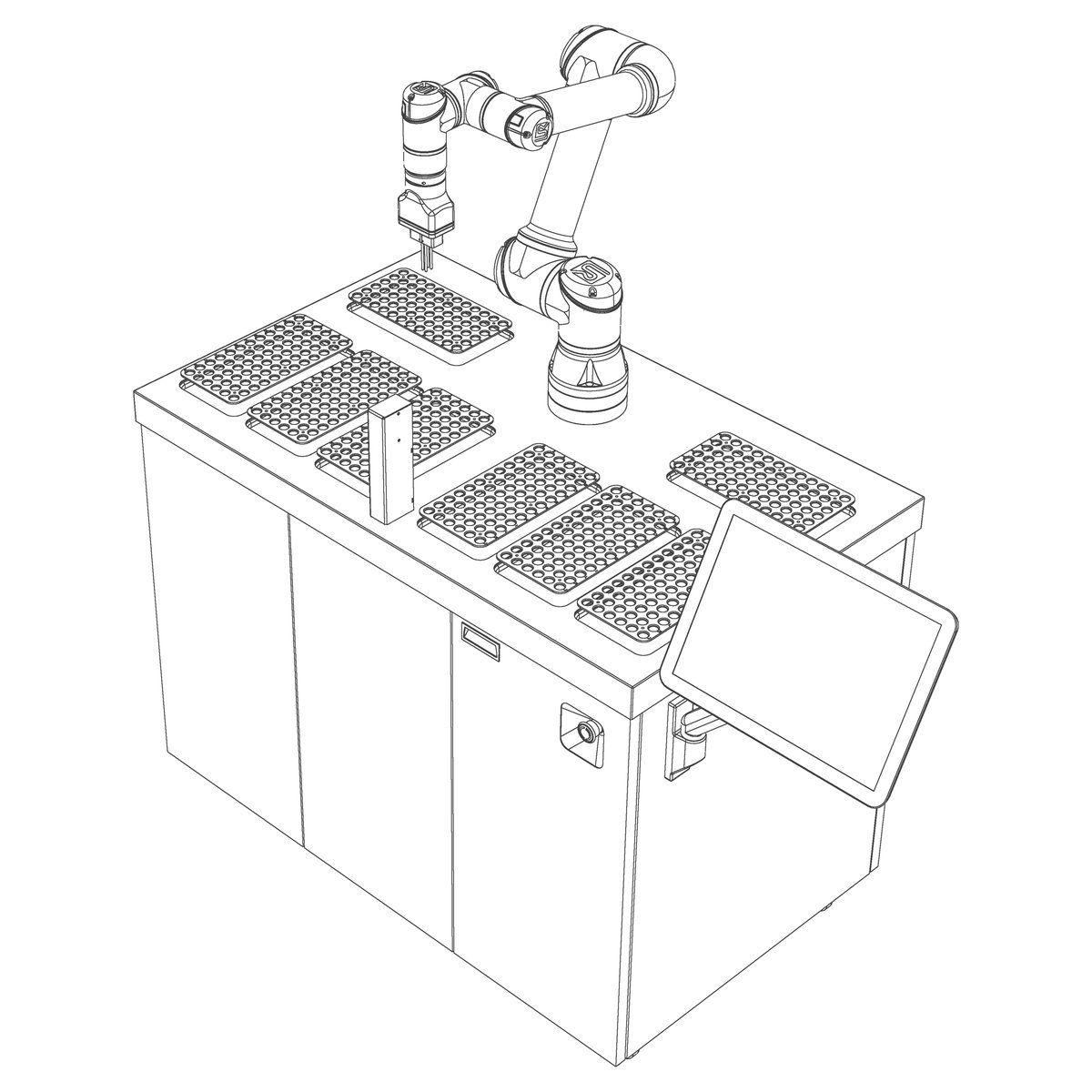
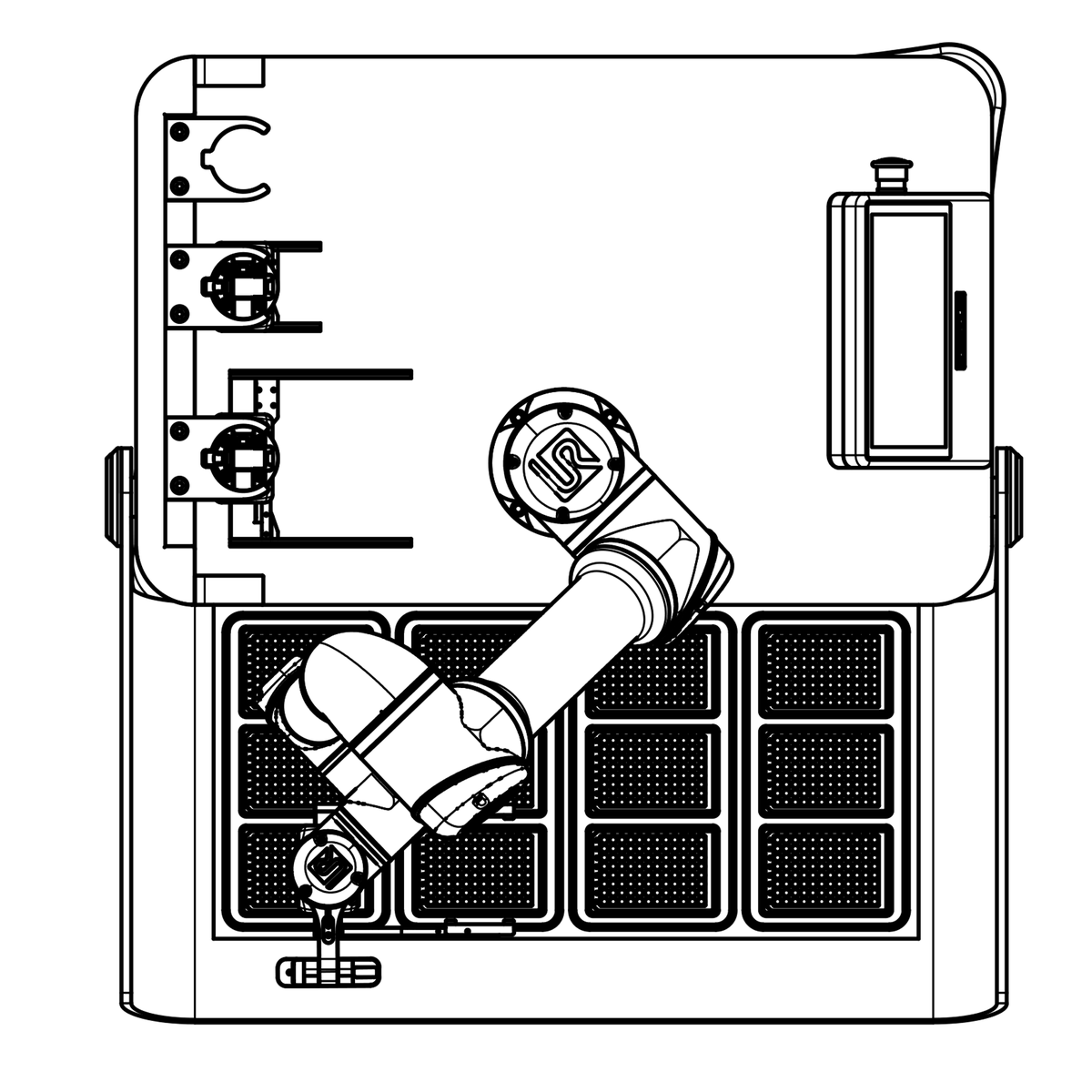 NOVAMove Flex — top view showing arm workspace, sample trays, and tool positions.
NOVAMove Flex — top view showing arm workspace, sample trays, and tool positions. NOVAMove Flex deployed in laboratory — automated sample handling at the point of need.
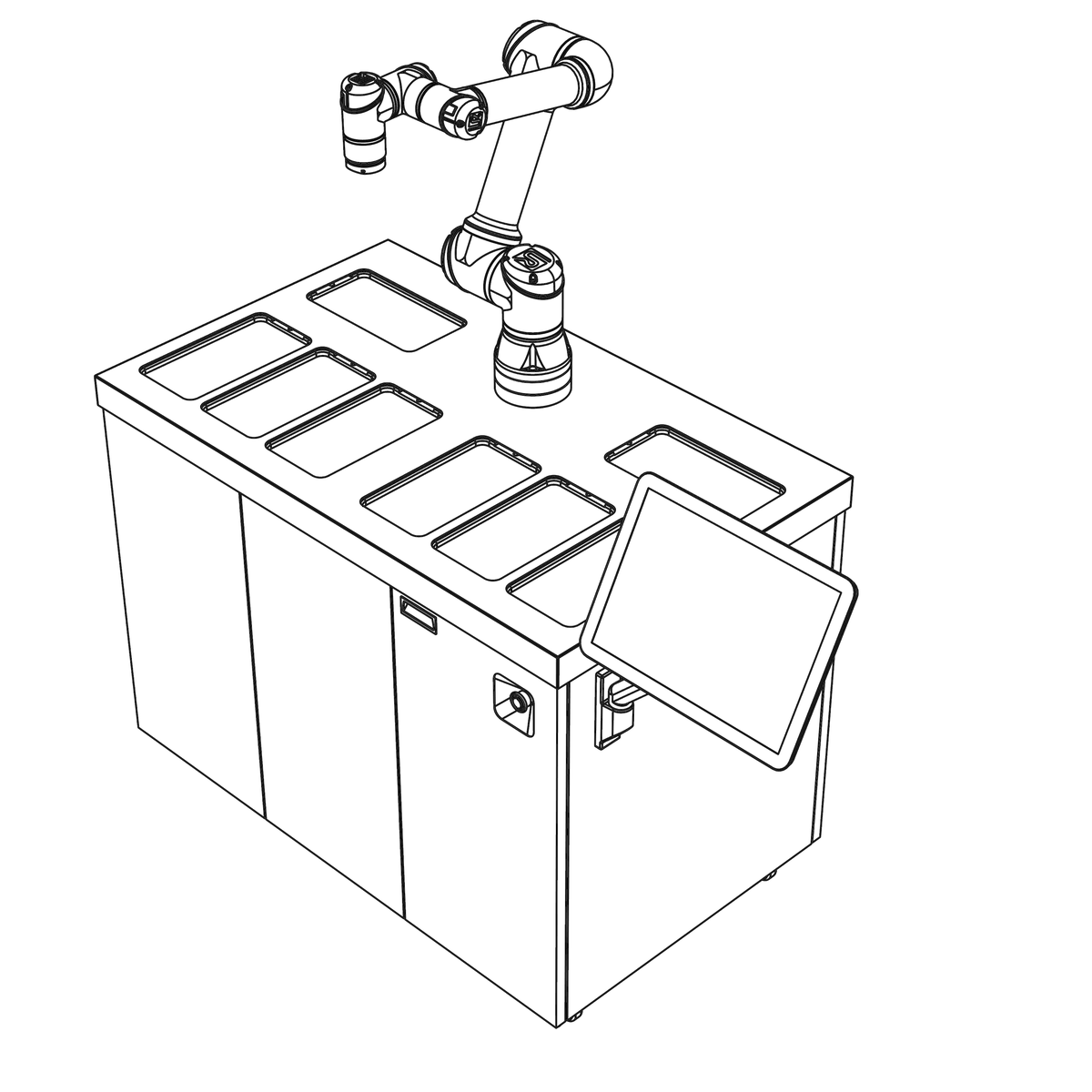
NOVAMove Flex deployed in laboratory — automated sample handling at the point of need.NOVAFlex — Modular Automation Stations
The fixed-position counterpart to the mobile robots. NOVAFlex stations handle the high-throughput pre-analytical tasks — labeling, sorting, archiving, aliquoting — that are too repetitive and too volume-dependent for manual work.
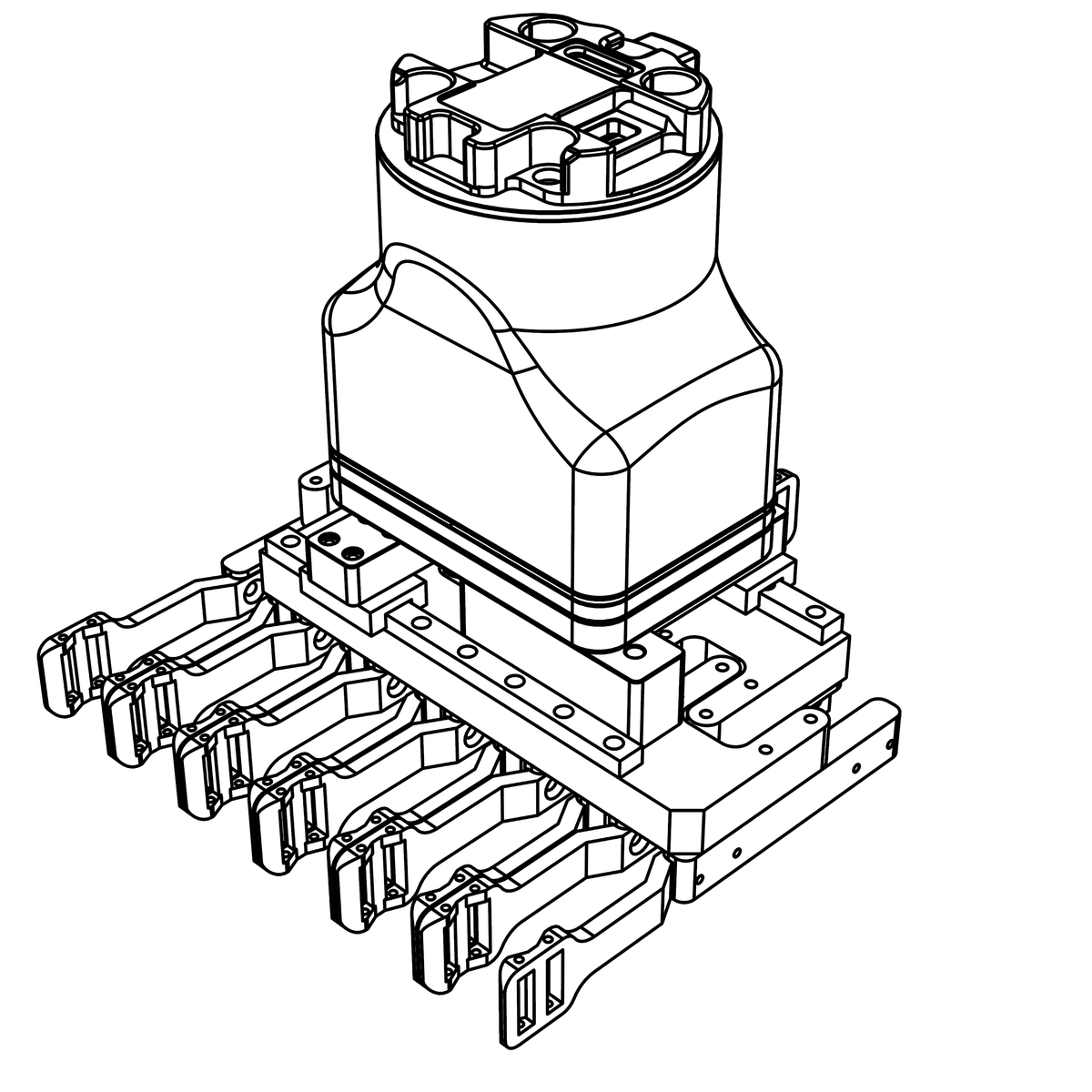
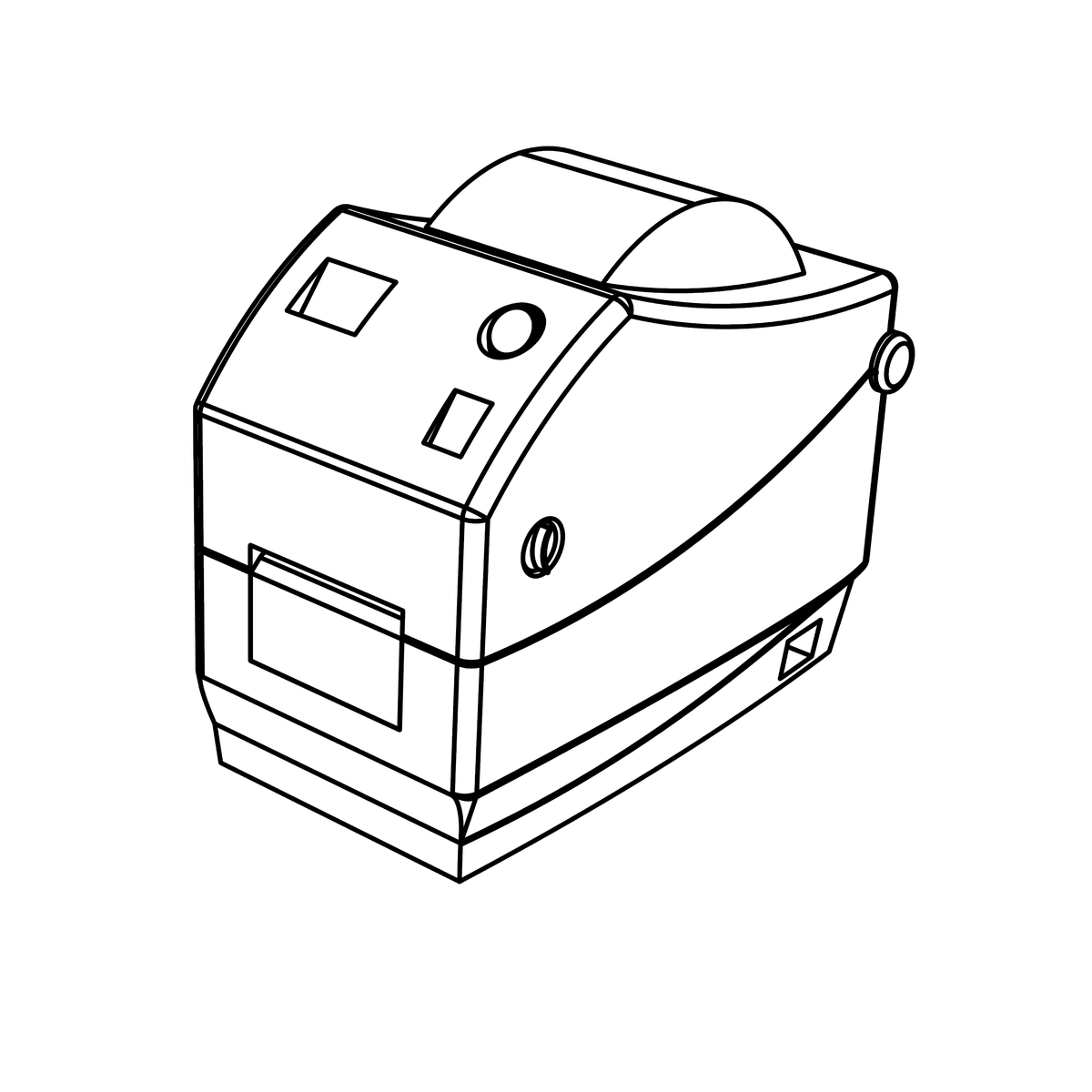
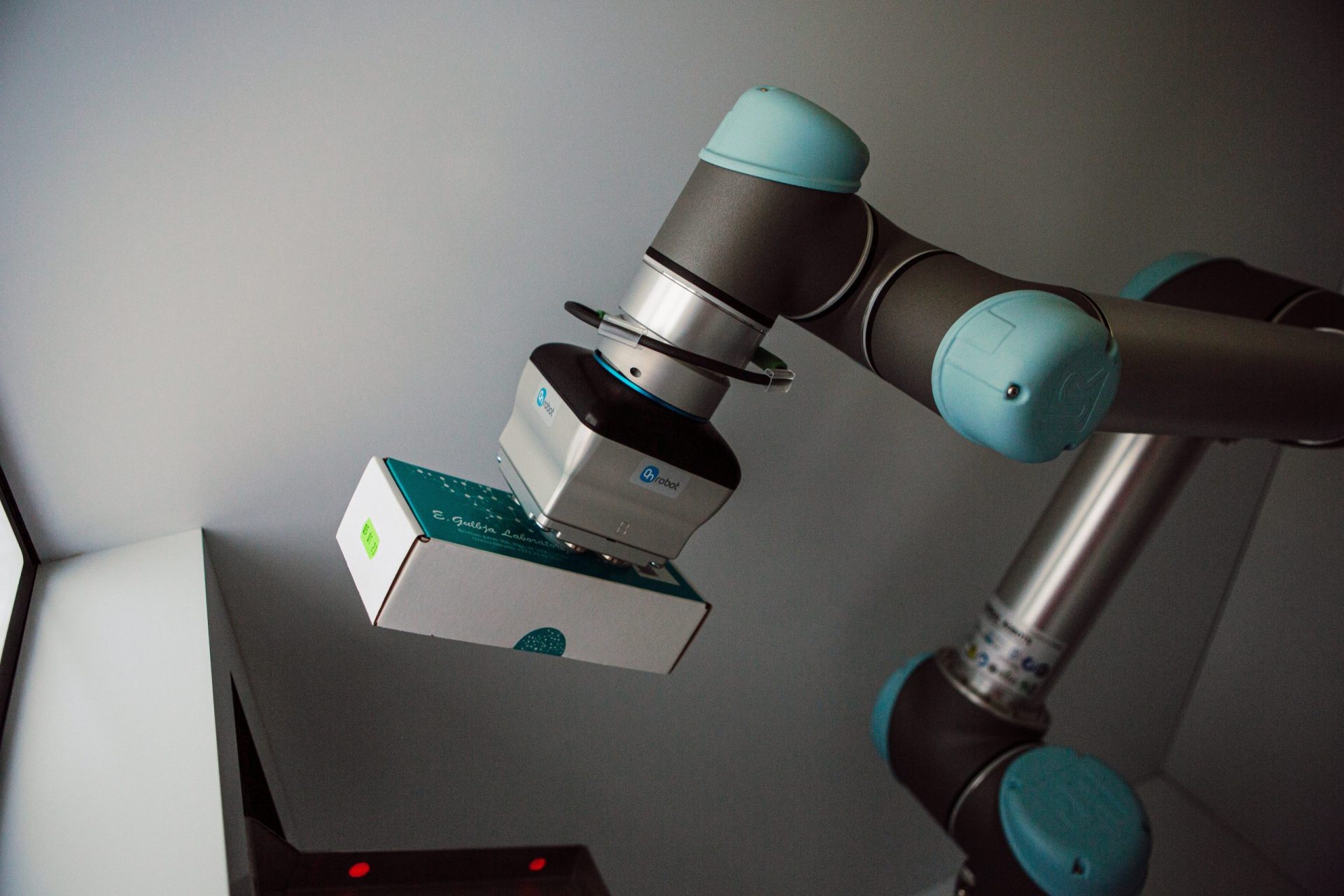
 NOVAFlex station in production — UR5e cobot base with vision, scanner, gripper, and labeler modules.
NOVAFlex station in production — UR5e cobot base with vision, scanner, gripper, and labeler modules.The platform is built on a Universal Robots UR5e cobot — the same robot arm ecosystem we know deeply from the AimRobotics work. But the value isn’t in the robot arm. It’s in the modular tool system built around it.
The modular tool architecture
One base platform. Six swappable tool modules. Each module is a custom-designed, purpose-built attachment that gives the station a specific capability.
NOVABase
Vision Module
Scanner Module
Rotator Module
6x Gripper Module
Labeler Module
These modules combine into complete automation stations, each configured for a specific workflow:
RALS
Robotic Automated Labeling Station. 600 tubes per hour. AI vision identifies tube type, scanner reads barcode, labeler applies patient label in correct orientation. Zero manual handling.
STAS
Sample Tube Archiving Station. 1,000 tubes per hour. Patent-pending mechanism. Receives, identifies, sorts, and archives tubes into standardized rack positions with full traceability.
SHSS
Sample Handling Sorting Station. Routes tubes to the correct analyzer queue based on test requirements. Eliminates the manual sorting step that creates bottlenecks in high-volume labs.
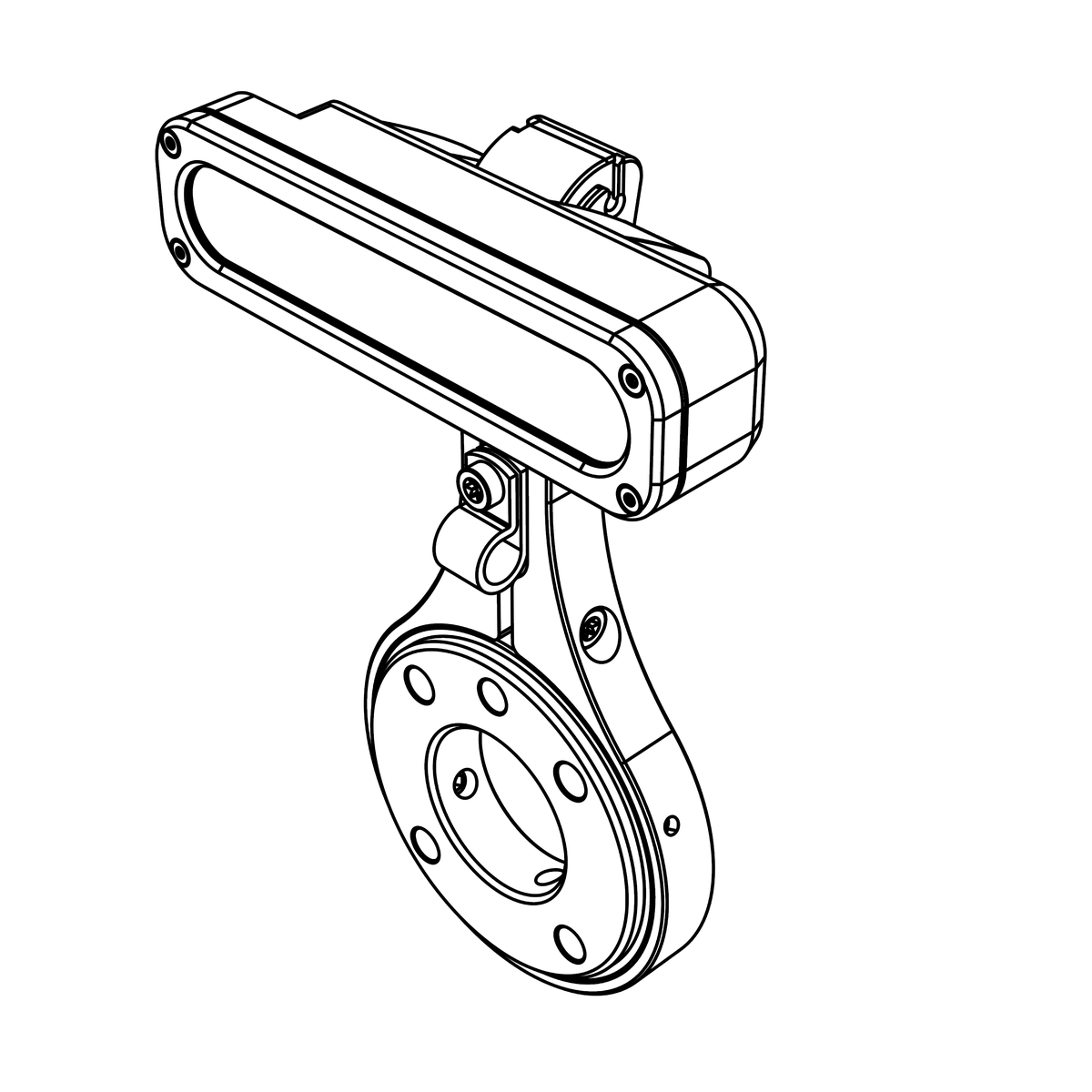
 Precision tube handling — the gripper module picks and places with sub-millimeter accuracy.
Precision tube handling — the gripper module picks and places with sub-millimeter accuracy. Custom 6-position gripper module — handles the full range of clinical tube diameters.
Custom 6-position gripper module — handles the full range of clinical tube diameters.The STAS archiving station is particularly notable — the patent-pending mechanism achieves 1,000 tubes/hour throughput while maintaining individual tube traceability. Retrieval time dropped from 10 minutes (manual search through archives) to 30 seconds (robotic retrieval by barcode). That’s a 20x improvement on a task that happens hundreds of times daily.
NOVALab — Self-Sampling Kiosks
NOVALab
24/7 contactless self-sampling terminals
- 21 locations across Latvia
- 300,000+ sampling kits dispensed
- 24/7 unattended operation
- Launched during COVID-19 — concept to operational in 4 months
- Contactless collection and return
NOVALab was born from crisis. When COVID-19 hit, E. Gulbja Laboratory needed a way to collect patient samples without person-to-person contact — and they needed it immediately.
We went from concept to operational deployment in four months. December 2020 concept. April 2021 live units in the field.
The kiosks dispense self-sampling kits and accept completed samples for laboratory processing, all without staff interaction. The system handles patient identification, kit tracking, sample chain-of-custody, and integration with the laboratory information system.
21 terminals now operate across Latvia, having dispensed over 300,000 sampling kits. What started as a pandemic response became permanent infrastructure.
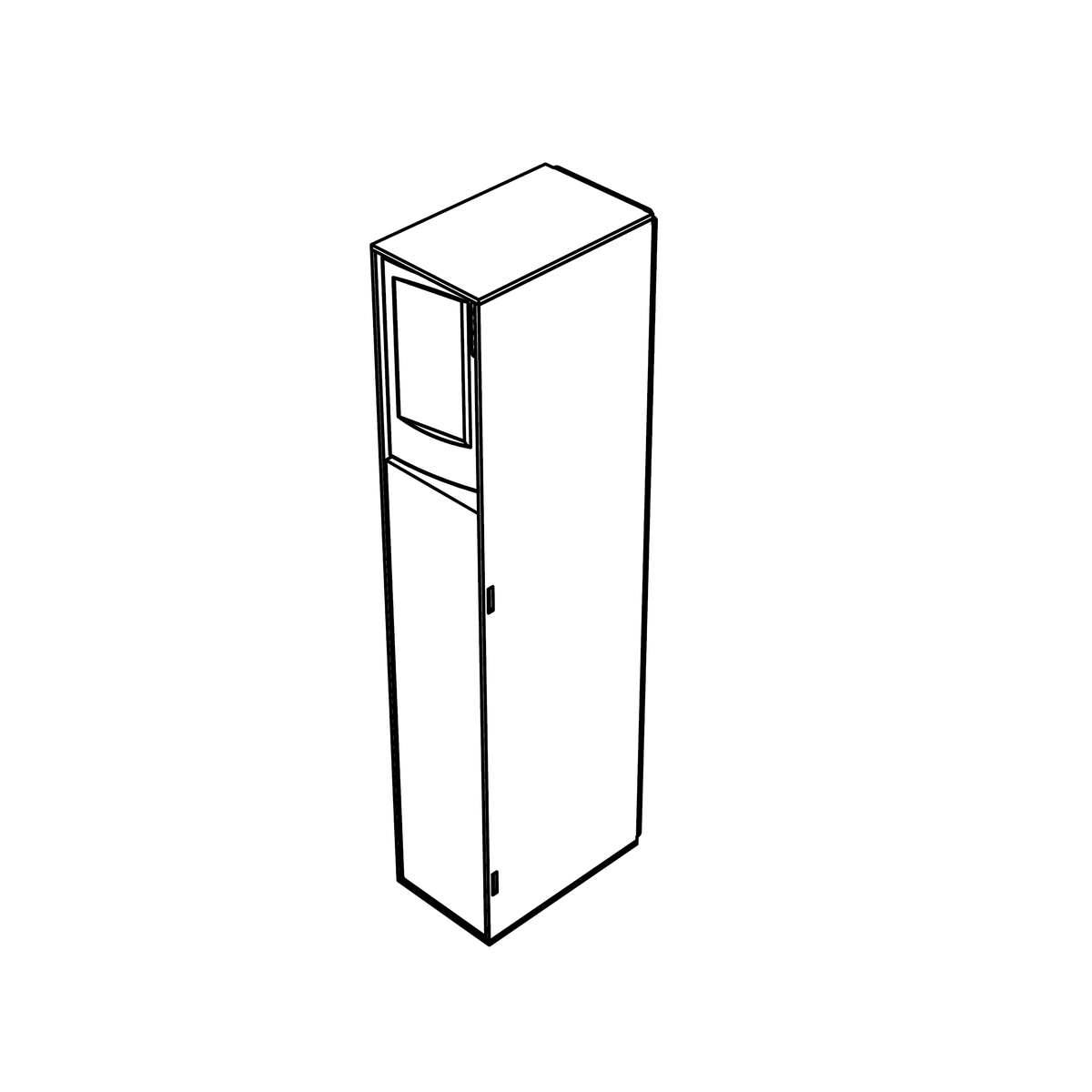
 NOVALab terminal — contactless self-sampling. 24/7 access, zero staff required.
NOVALab terminal — contactless self-sampling. 24/7 access, zero staff required.The deployment — E. Gulbja Laboratory
 E. Gulbja Laboratory — the largest private diagnostic lab in the Baltics. 2.1M examinations per year.
E. Gulbja Laboratory — the largest private diagnostic lab in the Baltics. 2.1M examinations per year.E. Gulbja Laboratory is the premier diagnostic laboratory in the Baltic states. 2.1 million patient examinations per year. 10.9 million individual analyses. This is the scale where automation stops being a nice-to-have and becomes an operational necessity.
The NovaticLab system covers the full sample lifecycle:
Measured results
Archival retrieval went from 10 minutes of manual searching to 30 seconds of robotic retrieval. The NOVAMove fleet handles more than half of all daily sample transport. 15+ staff hours freed per day — not through layoffs, but by redirecting skilled technicians from transport and sorting to analytical work that actually requires their training.
 AMR in active service — navigating between laboratory departments.
AMR in active service — navigating between laboratory departments. Robotic sample processing — automated handling at clinical scale.
Robotic sample processing — automated handling at clinical scale.The engineering underneath
Building clinical robotics systems is not the same as building industrial robotics. The constraints are different, the failure modes are different, and the consequences of failure are different.
Navigation in shared spaces. Hospital corridors have patients, staff, beds, carts, and unpredictable foot traffic. The AMR navigation system had to handle all of this without dedicated robot lanes, floor markers, or infrastructure modifications. The robots use the same elevators and doors as everyone else.
Sample integrity. These are biological samples with time-sensitive analytical requirements. A sample that arrives late, damaged, or mislabeled can mean a patient gets wrong results. The automation system’s error handling isn’t about retry logic — it’s about clinical safety.
Multi-robot coordination. When multiple AMRs share corridors, elevators, and docking stations, you need fleet-level traffic management. Deadlock prevention. Priority scheduling for urgent samples. Elevator arbitration so robots don’t block each other.
Vision systems for heterogeneous samples. Clinical tubes come in dozens of formats — different manufacturers, different cap colors, different label positions, different diameters. The AI vision system had to handle this variation without manual configuration for each tube type.
Modular tool design. The NOVAFlex tool modules needed to be swappable in the field without recalibration. That means precision mechanical interfaces, repeatable positioning, and tool-identity detection so the station software knows what’s attached.
 Vision system in action — AI identifies tube type, cap color, label orientation.
Vision system in action — AI identifies tube type, cap color, label orientation. Scanner module — barcode identification maintains chain of custody at every step.
Scanner module — barcode identification maintains chain of custody at every step.From concept to clinical deployment
Company founded. NOVALab concept initiated. COVID-19 created urgent need for contactless sample collection. Concept-to-deployment in 4 months — first self-sampling kiosks operational by early 2021.
NOVALab network scaled to 21 locations. 300,000+ sampling kits dispensed across Latvia. NOVAMove Porter development begins — first AMR prototypes navigating clinical corridors.
NOVAFlex stations deployed. RALS, STAS, and SHSS automation stations operational at E. Gulbja Laboratory. AMR fleet expanded. Multi-floor navigation validated — elevators, doors, cross-building transport.
Full system integration. NOVAMove Porter fleet, NOVAFlex stations, and NOVALab kiosks operating as a unified system. STAS patent-pending mechanism achieving 1,000 tubes/hr. Presented at SLAS Sample Management Symposium.
NOVAMove Flex launched. AMR with integrated robotic arm and AI vision. The system now covers sample collection, transport, processing, sorting, archiving, and retrieval — the full lifecycle automated.
What this demonstrates
This project is unusual because it spans virtually every discipline in robotics and automation — and all of it deployed in a regulated clinical environment with real patient samples.
Custom AMR hardware and navigation. Custom robotic station mechanics. Custom vision systems. Custom fleet management. Custom kiosk hardware. Full software stack from robot firmware to laboratory information system integration. All designed as one coherent system rather than bolted-together components from different vendors.
The E. Gulbja deployment proves that clinical laboratory automation doesn’t require purpose-built facilities. The NOVAMove robots navigate the same corridors as patients and staff. The NOVAFlex stations occupy the same bench space that manual processing used. The NOVALab kiosks sit in pharmacies and shopping centers, not in controlled laboratory environments.
That’s the difference between building a demo and building a product. The demo works in controlled conditions. The product works in reality.
Read more about the work behind this
Building autonomous systems for environments where the demo floor conditions don’t apply?
We’ve deployed robotic fleets in clinical facilities where failure means patient impact, not just lost uptime.
Start a conversation