Aerones
Infrastructure tribe leadership for the world's leading robotic wind turbine service company — custom battery systems, next-gen winches, industrial control migration, LPS business transformation, AI-driven inspection initiatives. Serving 10,000+ turbines across 27 countries.

Aerones is the world’s leading robotic wind turbine maintenance and inspection service provider. Their robots climb turbine towers, traverse blade surfaces, and perform inspection, cleaning, coating, and repair operations that would otherwise require rope-access technicians working at 80–150 meters in wind, rain, and sub-zero temperatures. Over 10,000 turbines serviced. 30,000+ blades maintained. 27 countries. Clients representing over 50% of global wind power capacity — NextEra, GE Vernova, Vestas, Enel, Siemens Gamesa.
This is not controlled-environment robotics. These systems operate outdoors, on curved composite surfaces, in conditions where failure means a crane deployment, a missed weather window, and six-figure downtime costs.
Aerones robot performing leading edge repair — robotic tool on blade surface, 100+ meters above ground.The problem
Aerones had proven the core concept — robotic blade maintenance was working commercially and scaling fast. Revenue nearly tripled in 2023. But the infrastructure underneath the robots hadn’t kept pace with the operational demands. The company was running field-critical systems on consumer-grade hardware. Connectivity was fragile. Power systems relied on diesel generators that added cost, logistics complexity, and carbon to every deployment. The Lightning Protection System (LPS) inspection business — a massive market opportunity — needed a complete rethink of both the technical approach and the commercial model. And the next wave of speed and cost improvements required AI-driven automation that didn’t exist yet.
The infrastructure tribe existed to solve all of this. Not one subsystem at a time — everything that sits underneath the robots and makes field operations actually work at scale.
What we owned
We led the Infrastructure Tribe — responsible for all R&D and product development of infrastructure systems across the company. This wasn’t a consulting engagement. This was embedded technical leadership across multiple product lines, reporting directly into the executive team.
Power Systems
Custom battery packs to replace diesel generators. Cell selection, BMS architecture, charging infrastructure, safety certification. Removing generators from the deployment equation entirely.
Connectivity
Starlink integration, LTE failover, mesh networking for field sites. Camera systems, real-time telemetry, remote robot control infrastructure. Making turbines in rural Texas controllable from Riga.
Winch Systems
Next-generation winch design. The winch is the lifeline — it raises, lowers, and positions the robot on the blade. New generation built for reliability, autonomous operation modes, and faster deployment cycles.
Control Systems
Migration from Raspberry Pi to industrial-grade Beckhoff controllers. Complete redesign of which systems run where, how they communicate, and what fails gracefully versus what stops the operation.
Transport & Logistics
Robot transport systems, deployment vehicle optimization, field setup procedures. Everything between “robot leaves the warehouse” and “robot is on the blade.”
Safety Systems
Hardware and software safety architecture for robots operating at height on critical infrastructure. Redundancy design, fail-safe modes, emergency procedures, certification support.
 Field deployment — the entire robotic system fits in a single van, operated by three technicians.
Field deployment — the entire robotic system fits in a single van, operated by three technicians. Ground control — technicians operate the robot remotely from the vehicle. No rope access required.
Ground control — technicians operate the robot remotely from the vehicle. No rope access required.From Raspberry Pi to industrial control
One of the highest-impact infrastructure decisions was the migration from consumer single-board computers to industrial-grade controllers across the robot fleet.
The existing systems ran critical robot functions — motor control, sensor fusion, safety interlocks — on Raspberry Pi boards. For prototypes and early commercial operations, this worked. For a fleet of robots servicing 10,000+ turbines annually across 27 countries, in conditions ranging from Texas heat to Scandinavian winter, it was a reliability liability.
The migration to Beckhoff industrial controllers wasn’t just swapping hardware. It was a complete rearchitecture of which control systems run where, how subsystems communicate, what the real-time requirements are versus what can run on softer timing, and critically — what happens when something fails at 120 meters in a 40 km/h crosswind.
The new architecture separated hard real-time control (motor commutation, safety interlocks, winch tension regulation) from supervisory functions (mission planning, telemetry, remote access) with proper industrial fieldbus communication between them. Deterministic timing where physics demands it. Flexibility where operations benefit from it.
 R&D workshop, Riga — robot subsystems under assembly and test. This is where infrastructure meets the machine.
R&D workshop, Riga — robot subsystems under assembly and test. This is where infrastructure meets the machine.Next-generation winch systems
The winch is the single most critical infrastructure component in the Aerones system. It’s the physical link between ground and blade. It raises the robot, holds it in position, manages tension during blade-following operations, and brings everything back down safely. If the winch fails, the operation stops.
The existing winch generation worked, but it was designed for an earlier stage of the company — lower throughput, smaller fleet, more forgiving operational tempo. As Aerones scaled past thousands of turbines per year, the winch needed to get faster, more reliable, and capable of autonomous operation modes that reduced crew dependency.
We designed the next-generation winch system with:
- Higher-performance drive systems for faster deployment and retrieval cycles
- Autonomous tension regulation that adapts to wind loading and blade geometry in real time
- Modular architecture for field serviceability — swap a motor or controller without replacing the entire unit
- Integrated diagnostics and predictive maintenance data collection
- Reduced setup time from arrival to robot-on-blade
The winch redesign was not a standalone project — it was tightly coupled with the control system migration, the power system changes, and the safety architecture. Every subsystem touches the winch.
Custom battery systems
Every Aerones deployment previously required a diesel generator on-site. Generators add fuel cost, logistics weight, noise, emissions, carbon footprint, and maintenance burden. For a company whose entire value proposition is making wind energy more efficient and sustainable, running diesel to power the robots was operationally necessary but strategically wrong.
We developed custom battery pack systems to replace generators for standard deployments. This involved cell chemistry selection for the specific discharge profiles (high peak draw during winch operations, sustained moderate load during blade work), BMS design for field conditions (temperature extremes, vibration, transport shock), charging infrastructure that works with the deployment logistics, and safety architecture appropriate for energy storage systems operating near rotating machinery at height.
The battery systems reduced deployment complexity, eliminated generator logistics, cut operational carbon footprint, and improved the economics of every service call.
Connectivity and remote operations
Aerones robots operate on wind farms. Wind farms are in remote locations with poor or no cellular coverage. But modern robotic operations require high-bandwidth, low-latency connectivity for real-time video feed from blade cameras, remote operator control, telemetry streaming, AI inference data upload, fleet management, and diagnostics.
We built the connectivity stack:
- Starlink integration for primary high-bandwidth uplink at remote sites
- LTE/cellular failover for sites with partial coverage
- Local mesh networking between ground control, winch systems, and robot
- Camera systems for blade inspection, operational monitoring, and safety oversight
- Real-time telemetry pipeline from robot sensors through to fleet management dashboards
The goal was enabling remote robot operation — a technician in Riga controlling a robot on a turbine in Texas. This is where Starlink became transformative. With reliable satellite internet, Aerones could decouple the skilled operator from the physical location, dramatically increasing the number of operations a single expert could oversee per day.
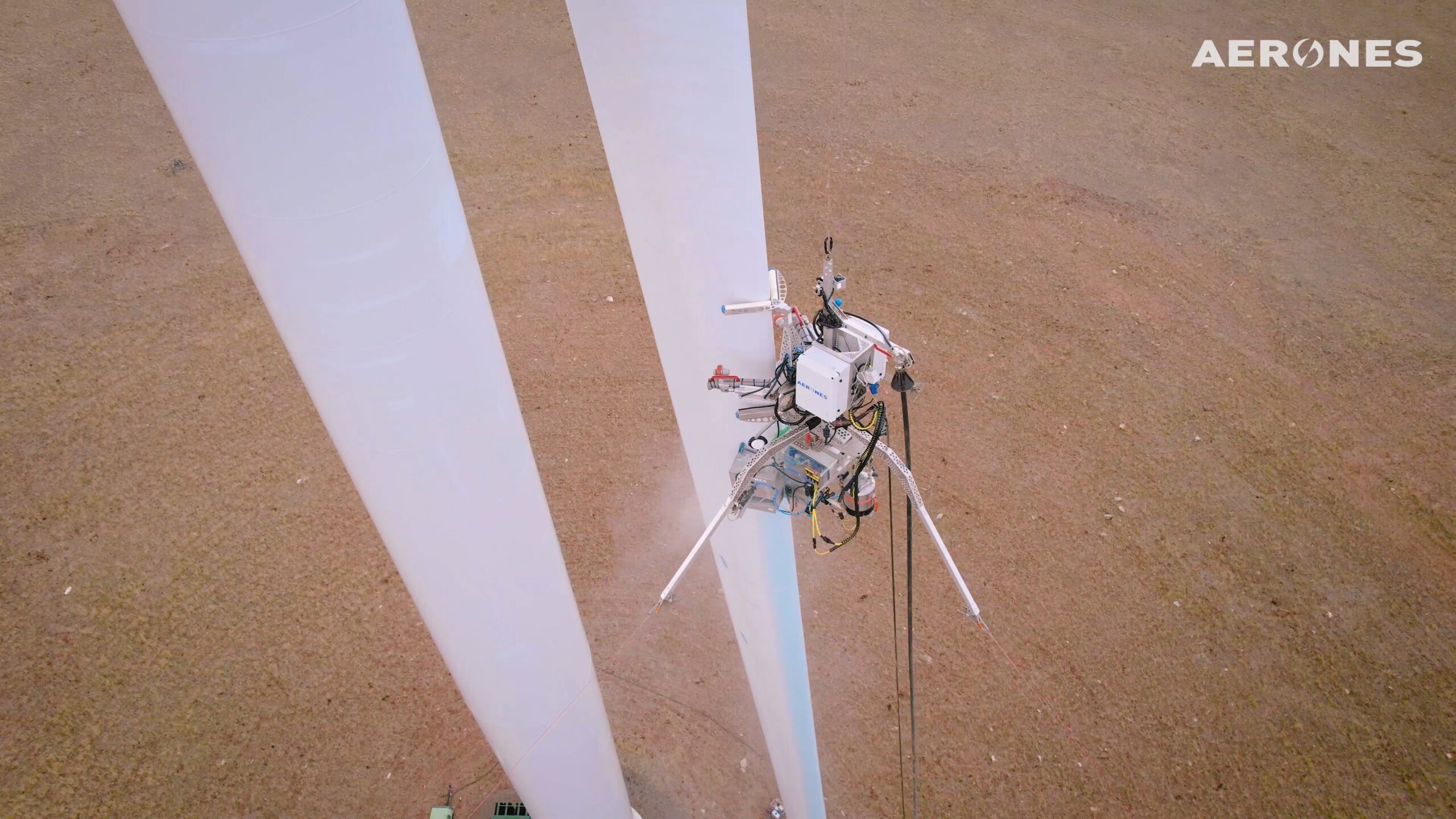
 Blade cleaning, Texas — robotic system on blade surface. Three-brush system with biodegradable soap supply.
Blade cleaning, Texas — robotic system on blade surface. Three-brush system with biodegradable soap supply. Tower cleaning operations — robotic system traversing the turbine tower structure.
Tower cleaning operations — robotic system traversing the turbine tower structure.LPS — rebuilding the business case
Lightning Protection System inspection was an existing Aerones service, but it was underperforming its potential. The technology could measure conductor resistance across the full length of every blade — something that traditional methods (manual inspection with a multimeter at accessible points) couldn’t match. But the commercial model, the operational workflow, and the data reporting didn’t reflect the true value of what the technology could deliver.
We replanned the entire LPS business:
- Technical capability expansion — improving measurement accuracy, coverage, and speed. The robot can inspect an LPS in under 30 minutes per blade, with full-length conductor continuity data that no manual method can replicate
- Commercial repositioning — reframing LPS inspection from a standalone service to a critical component of commissioning, end-of-warranty, and predictive maintenance packages
- Data and reporting — building the analytics and reporting pipeline that turns raw conductivity measurements into actionable maintenance decisions for wind farm operators
- Operational efficiency — setup in 40 minutes, no de-rigging between blades, up to six turbines per day
The LPS business went from an underperforming service line to a strategic growth driver.
 LPS inspection — robotic conductivity measurement across the full blade length. Data that manual inspection simply cannot produce.
LPS inspection — robotic conductivity measurement across the full blade length. Data that manual inspection simply cannot produce.AI-driven inspection — the next step
The LPS transformation opened a bigger question: what if you could pre-screen turbines with drones before deploying robots at all?
We initiated a new AI drone inspection program specifically aimed at making the LPS assessment cycle dramatically faster. Instead of sending a robot up every blade to measure conductivity, a drone survey could identify visual indicators of lightning damage, receptor condition, and coating degradation — triaging which turbines actually need robotic LPS testing and which can wait.
This meant building:
- Custom camera and sensor payloads optimized for detecting LPS-relevant surface conditions from aerial imagery
- AI classification models trained to flag lightning strike damage, receptor oxidation, and down-conductor indicators from high-resolution drone captures
- Integration with the LPS reporting pipeline — drone pre-screening data feeding directly into the decision workflow for robotic follow-up
The vision: make the full LPS service cycle 20× faster and significantly cheaper by only deploying robots where the AI flags actual issues. Drone pre-screening doesn’t replace robotic measurement — it eliminates wasted robot deployments and concentrates the expensive, precise work where it matters.
 Drone survey — AI-powered pre-screening to identify which turbines need robotic LPS intervention.
Drone survey — AI-powered pre-screening to identify which turbines need robotic LPS intervention.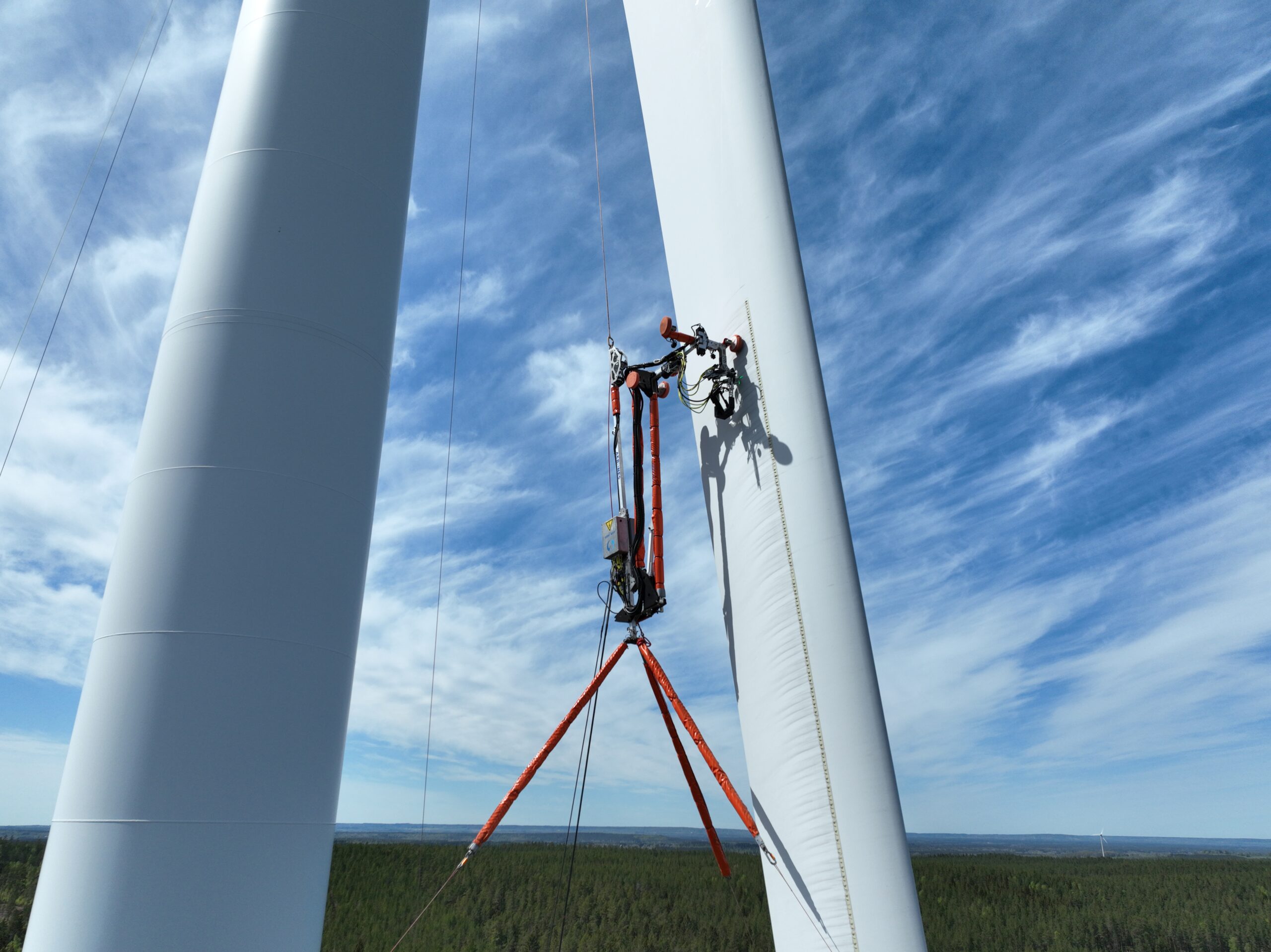 The scale of the problem — thousands of turbines, each with three blades, each needing LPS verification. Smart triage changes the economics.
The scale of the problem — thousands of turbines, each with three blades, each needing LPS verification. Smart triage changes the economics.Where it all connects — Crawler Gen 3
The infrastructure we built doesn’t exist in a vacuum. Aerones’ Crawler Gen 3 — their latest internal blade inspection robot — is a good example of why the infrastructure layer matters. The crawler operates inside blade structures with 3D LiDAR, 360° 5K cameras, a 61MP root zone lens, and adaptive LED lighting. It generates massive amounts of data that needs to move from inside a blade, through the robot, down the tower, across the connectivity stack, and into the Visual Inspection Studio for AI-powered defect analysis.
That data path runs on the connectivity infrastructure, power systems, and control architecture we built. The crawler is Aerones’ product — the infrastructure that makes it deployable and useful at fleet scale is ours.
 Crawler Gen 3 — Aerones’ latest internal blade inspection platform. The infrastructure underneath it is what we built.
Crawler Gen 3 — Aerones’ latest internal blade inspection platform. The infrastructure underneath it is what we built.The service platform
The infrastructure work didn’t exist in isolation. It supported and enabled the full spectrum of Aerones’ robotic services — every one of which depends on the winch, the power, the connectivity, and the control systems we built.

Leading Edge Repair
Robotic surface preparation and protective coating application on blade leading edges — the highest-wear area on any turbine. Precision work at height that directly impacts aerodynamic efficiency.
Ice-Phobic Coating
Robotic application of ice-phobic coatings on blade surfaces. Critical for Nordic and high-altitude installations where ice accumulation causes production losses, safety hazards, and structural fatigue.

Tower Cleaning
TCL G2 tower cleaning robot. Automated cleaning of turbine tower structures — removing environmental buildup that accelerates corrosion and degrades coating integrity.
The scale of it
Clients include NextEra, GE Vernova, Vestas, Enel Green Power, Siemens Gamesa, and operators across four continents. The infrastructure we built is underneath every one of those deployments.
 Aerones field team — certified technicians operate the robots from ground level. Safety, speed, precision.
Aerones field team — certified technicians operate the robots from ground level. Safety, speed, precision.Timeline
Infrastructure tribe established. Took ownership of connectivity, power, transport, and safety systems. Initial assessment of technical debt across field infrastructure. Starlink integration prototyped and validated for remote site operations.
Control system migration launched. Began systematic migration from Raspberry Pi to Beckhoff industrial controllers. Custom battery system development initiated. LPS business case replanned and repositioned. Next-gen winch architecture defined.
AI initiatives kicked off. AI drone pre-screening program launched for LPS — custom sensor payloads, defect classification models. Winch Gen 2 deployed to fleet. Battery systems replacing generators in standard deployments. Revenue nearly tripled. $30M funding round.
Scale and validation. 10,000+ turbines serviced. Crawler Gen 3 launched. Visual Inspection Studio released. US operations expanded — Dallas office opened. $62M oversubscribed financing round. €4M EU Innovation Fund grant. Infrastructure systems proven at global fleet scale.
The engineering underneath
A few things that define the quality of infrastructure work at this scale:
Reliability at height. Every infrastructure component we designed had one overriding requirement: it cannot fail in a way that strands a robot on a blade. Redundancy is not optional. Graceful degradation is not a nice-to-have. When you’re 120 meters up in a North Sea crosswind, the difference between “the system recovers” and “deploy a crane” is a six-figure cost difference and a week of lost operations.
Field serviceability. Aerones operates across 27 countries. If a winch motor fails in rural Oklahoma, it needs to be swapped by the on-site crew, not shipped back to Riga. Every subsystem we designed was evaluated for field replacement — modular interfaces, standard tooling, documented procedures, spares strategy.
Operational tempo. The infrastructure can’t be the bottleneck. Setup time, deployment time, transition between turbines — every minute of infrastructure overhead is a turbine not being serviced. The winch, power, and connectivity systems were designed around operational speed, not just technical performance.
Data pipeline. Modern wind turbine service is increasingly data-driven. Every inspection, every repair, every measurement generates data that feeds predictive maintenance models, warranty claims, and fleet management decisions. The infrastructure needed to capture, transmit, and structure this data reliably — even from sites with zero terrestrial internet.
What this demonstrates
This is what infrastructure-level product engineering looks like in a deep-tech company scaling at venture speed.
Not one robot. Not one subsystem. The entire infrastructure layer — power, connectivity, control, transport, safety — redesigned and rebuilt while the company continued to operate and scale. Custom battery systems replacing generators. Industrial controllers replacing consumer boards. Satellite internet replacing “hope there’s cell signal.” AI and computer vision creating entirely new service categories.
The infrastructure tribe didn’t build robots. It built everything that makes the robots deployable, reliable, and economically viable at global scale. That’s the work that doesn’t make the press release but determines whether the company scales or stalls.
Read more about the work behind this
Building field-deployed systems that need custom power, connectivity, or industrial control architecture?
We’ve done it — from custom battery packs through Beckhoff migration to AI-driven inspection at 10,000+ unit scale.
Start a conversation